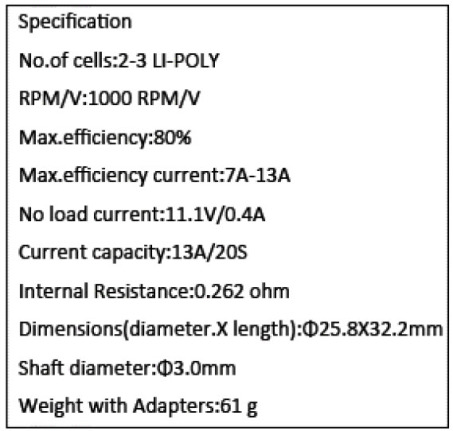
Actionneur : les deux moteurs brushless
En fonction des caractéristiques de la puissance électrique délivrée par son contrôleur, chaque moteur fournit un effort de poussée en N. Le modèle de comportement du moteur n'est pas linéaire car la force de poussée est liée à la vitesse de rotation au carré de l'hélice. Ce modèle ne peut donc être déterminé qu'expérimentalement autour d'un point de fonctionnement. |  |